该机械手臂具有7个自由度,由模块化的驱动控制单元,力矩传感器,连接件组装而成。该手臂每个关节都有力矩传感器,编码器,可以进行力反馈及位置控制。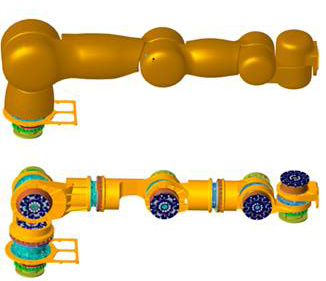
主要技术指标和参数:
- 自由度配置:7个关节,自由度:7个;
- 本体重量:小于30Kg;
- 臂长:1 m;
- 关节最大速度:30º/s;
- 关节最大运动范围:0º ~90º,-0º~90º及±20º;
- 末端输出力:10Kg;
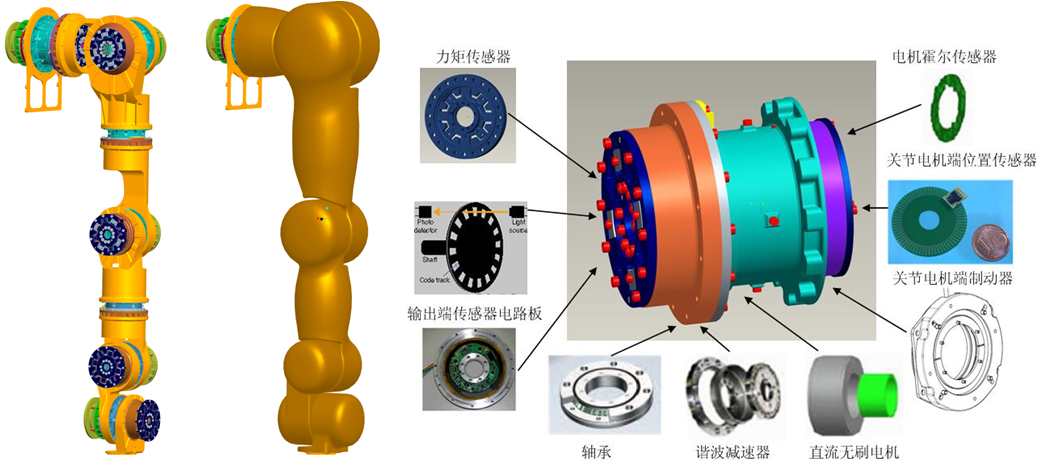
- 传感器配置:关节位置、关节力矩、电机位置、电流;
- 控制模式:位置控制,阻抗控制;
- 电压/功耗:DC 36V/20A
原理图:
应用领域:
- 移动机器人
- 人形机器人
- 服务机器人